SLAM是AR的重要技术基础,基于实验室的设备进行一些与AR结合的初步的探索。
前言
Vins-mono是香港科技大学开源的一个VIO算法,https://github.com/HKUST-Aerial-Robotics/VINS-Mono,是用紧耦合方法实现的,通过单目+IMU恢复出尺度。
环境: ubuntu18.04 ,ros melodic, opencv3(若下载较慢, 建议使用数据流量或科学上网)
1. 安装librealsense SDK
参考教程: intel官方
- 注册公钥
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
- 将服务器添加到存储库列表中
- Ubuntu 16 LTS:
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -uUbuntu 18 LTS:sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -uUbuntu 20 LTS:sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo focal main" -u
- 安装库
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
- 安装developer和debug packages
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg (这个我没装上但好像不影响跑)
- 测试SDK(终端运行realsense-viewer)(需要usb3.0,否则没有imu输入)
2. 安装ROS端realsense工程
提前运行下面的命令可减少安装中出现的错误, 注意命令中ros版本的选择
sudo apt-get install ros-kinetic-ddynamic-reconfigure
(Resource not found: rgbd_launch)
sudo apt-get install ros-melodic-rgbd-launch
启动测试
roslaunch realsense2_camera rs_rgbd.launch
rosrun rviz rviz
rviz中添加话题:
左上角 Displays 中 Fixed Frame 选项中,下拉菜单选择 camera_link,Global Status由红色变绿。
Add -> 上方点击 By topic -> /depth_registered 下的 /points 下的/PointCloud2
Add -> 上方点击 By topic -> /color 下的 /image_raw 下的image
......
3. 安装VINS并在数据集上测试
下载数据集(可选),本人初次选择EuRoC MAV数据集和AR数据集
安装ceres solver, 根据其他博客的提示,装了旧版本1.14.0
1.安装依赖
//第一步,打开sources.list
sudo gedit /etc/apt/sources.list
//第二步,将下面的源粘贴到最上方sources.list
deb http://cz.archive.ubuntu.com/ubuntu trusty main universe
//第三步,更新源
sudo apt-get update
//第四步,重新输入依赖项安装命令安装依赖项
sudo apt-get install liblapack-dev libsuitesparse-dev libcxsparse3.1.2 libgflags-dev libgoogle-glog-dev libgtest-dev
2.下载ceres-solver-1.14.0
wget ceres-solver.org/ceres-solver-1.14.0.tar.gz
3.解压
tar xvf ceres-solver-1.14.0.tar.gz
4.编译
cd ceres-solver-1.14.0
mkdir build
cd build
cmake ..
make -j4
5.安装
sudo make install
此处选择原始vins-mono
cd ~/catkin_ws/src
下面选一个
# git clone https://github.com/Jichao-Peng/VINS-Mono-Optimization.git
# git clone https://github.com/HKUST-Aerial-Robotics/VINS-Mono.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
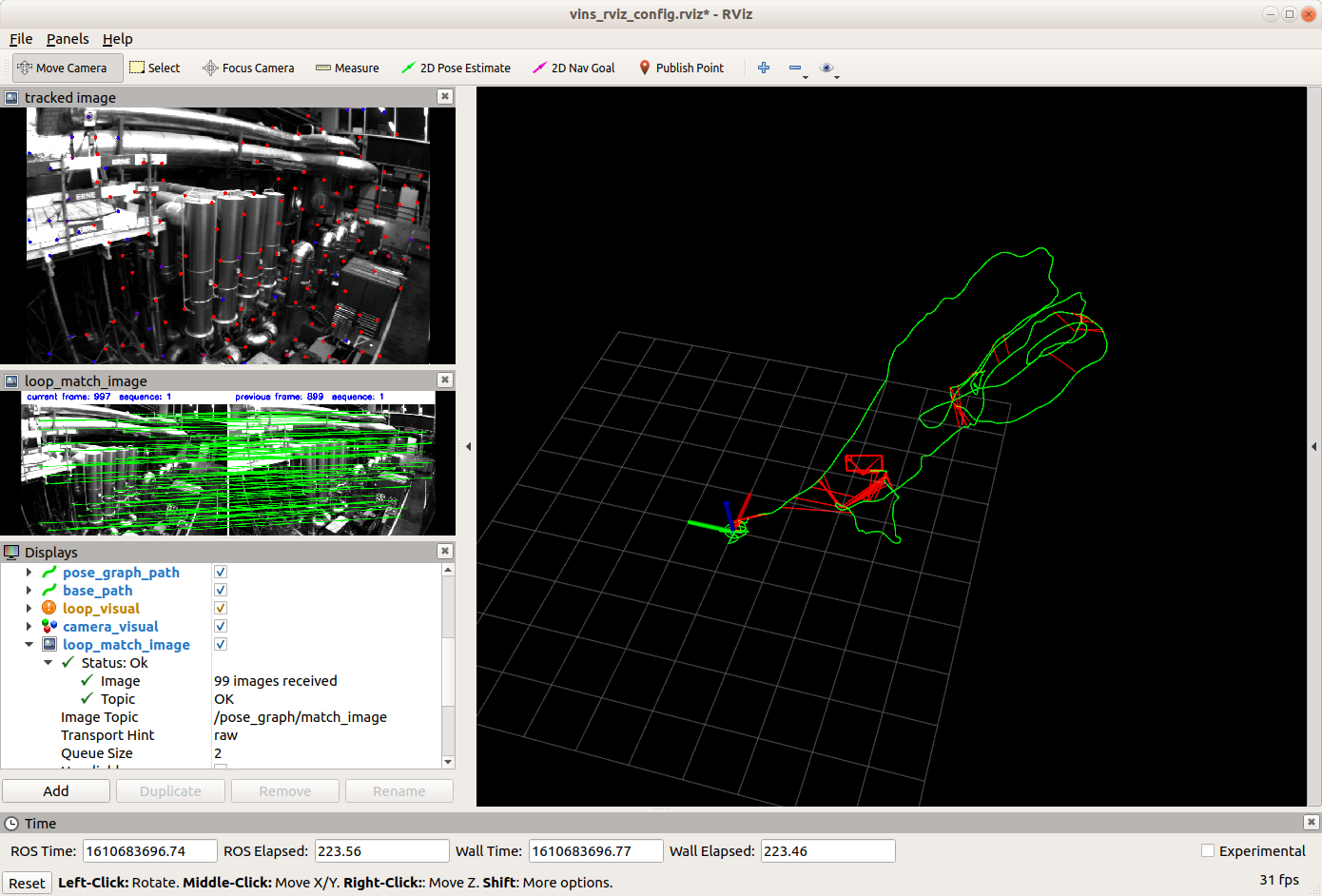
测试数据集,以MH01为例
roslaunch vins_estimator euroc.launch
roslaunch vins_estimator vins_rviz.launch
rosbag play YOUR_PATH_TO_DATASET/MH_01_easy.bag
4. 使用RealSenseD435i测试VINS及AR DEMO
1.修改realsense包里的rs_camera.launch文件(也可另存为rs_camera_vins.launch)
第一处,修改unite_imu_method如下,这里是让IMU的角速度和加速度作为一个topic输出
<arg name="unite_imu_method" default="copy"/>
第二处,修改enable_sync参数为true,这里是开机相机和IMU的同步
<arg name="enable_sync" default="true"/>
2.修改VINS-Mono包里的realsense_color_config.yaml文件
(1)修改订阅的topic
imu_topic: "/camera/imu"
image_topic: "/camera/color/image_raw"
(2)修改相机内参,这里先再次打开运行realsesne包,然后可以通过如下命令获取相机内参
roslaunch realsense2_camera rs_camera_vins.launch
rostopic echo /camera/color/camera_info
(3)IMU到相机的变换矩阵
# Extrinsic parameter between IMU and Camera.
estimate_extrinsic: 2 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
# 1 Have an initial guess about extrinsic parameters. We will optimize around your initial guess.
# 2 Don't know anything about extrinsic parameters. You don't need to give R,T. We will try to calibrate it. Do some rotation movement at beginning.
#If you choose 0 or 1, you should write down the following matrix.
(4)IMU参数
#imu parameters The more accurate parameters you provide, the better performance
acc_n: 0.2 # accelerometer measurement noise standard deviation. #0.2
gyr_n: 0.05 # gyroscope measurement noise standard deviation. #0.05
acc_w: 0.02 # accelerometer bias random work noise standard deviation. #0.02
gyr_w: 4.0e-5 # gyroscope bias random work noise standard deviation. #4.0e-5
g_norm: 9.80 # gravity magnitude
(5)是否需要在线估计同步时差
#unsynchronization parameters
estimate_td: 0 # online estimate time offset between camera and imu
td: 0.000 # initial value of time offset. unit: s. readed image clock + td = real image clock (IMU clock)
(6)相机曝光改成全局曝光
#rolling shutter parameters
rolling_shutter: 0 # 0: global shutter camera, 1: rolling shutter camera
rolling_shutter_tr: 0 # unit: s. rolling shutter read out time per frame (from data sheet).
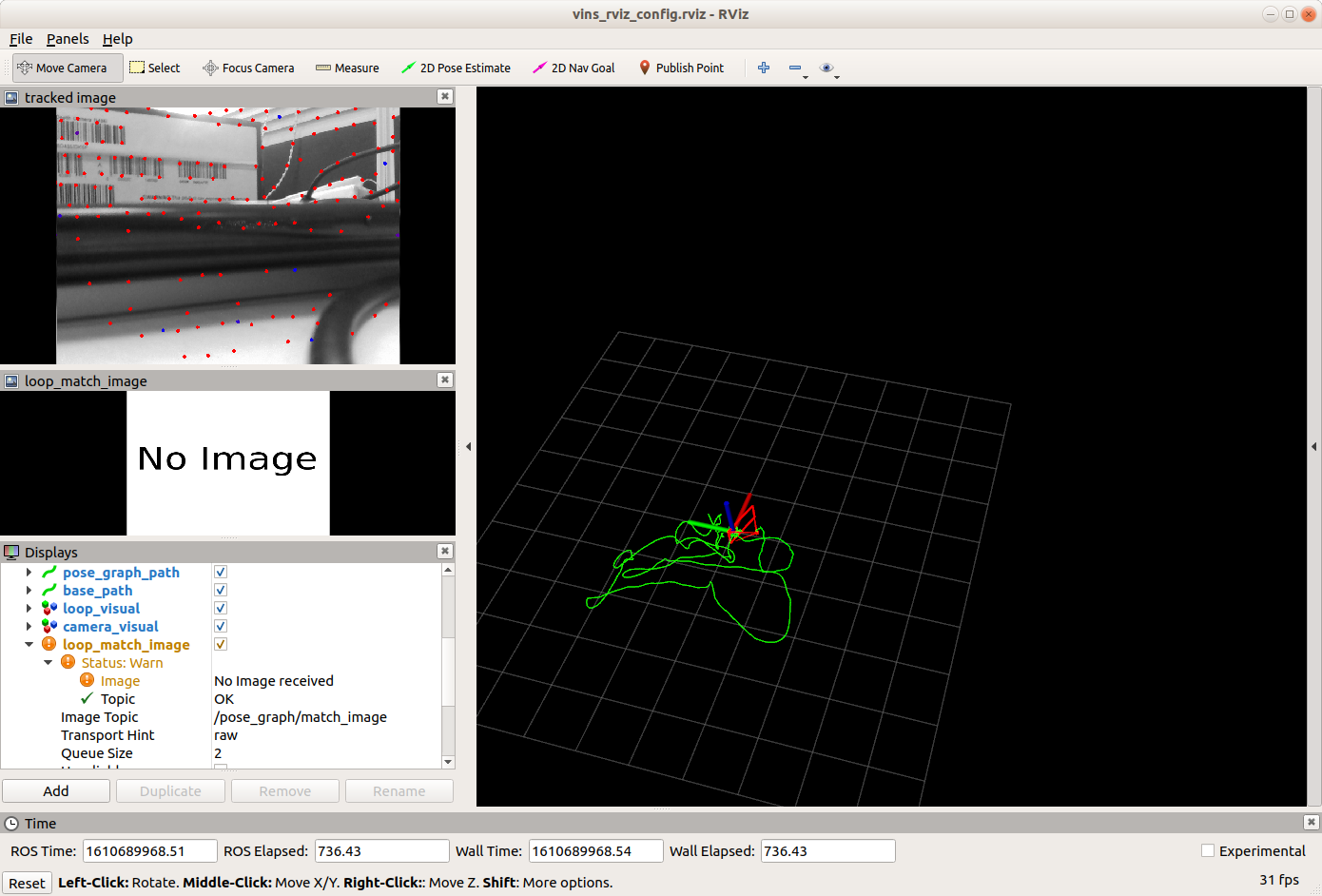
3. 打开摄像头,运行VINS-Mono
roslaunch realsense2_camera rs_camera_vins.launch
roslaunch vins_estimator realsense_color.launch
roslaunch vins_estimator vins_rviz.launch
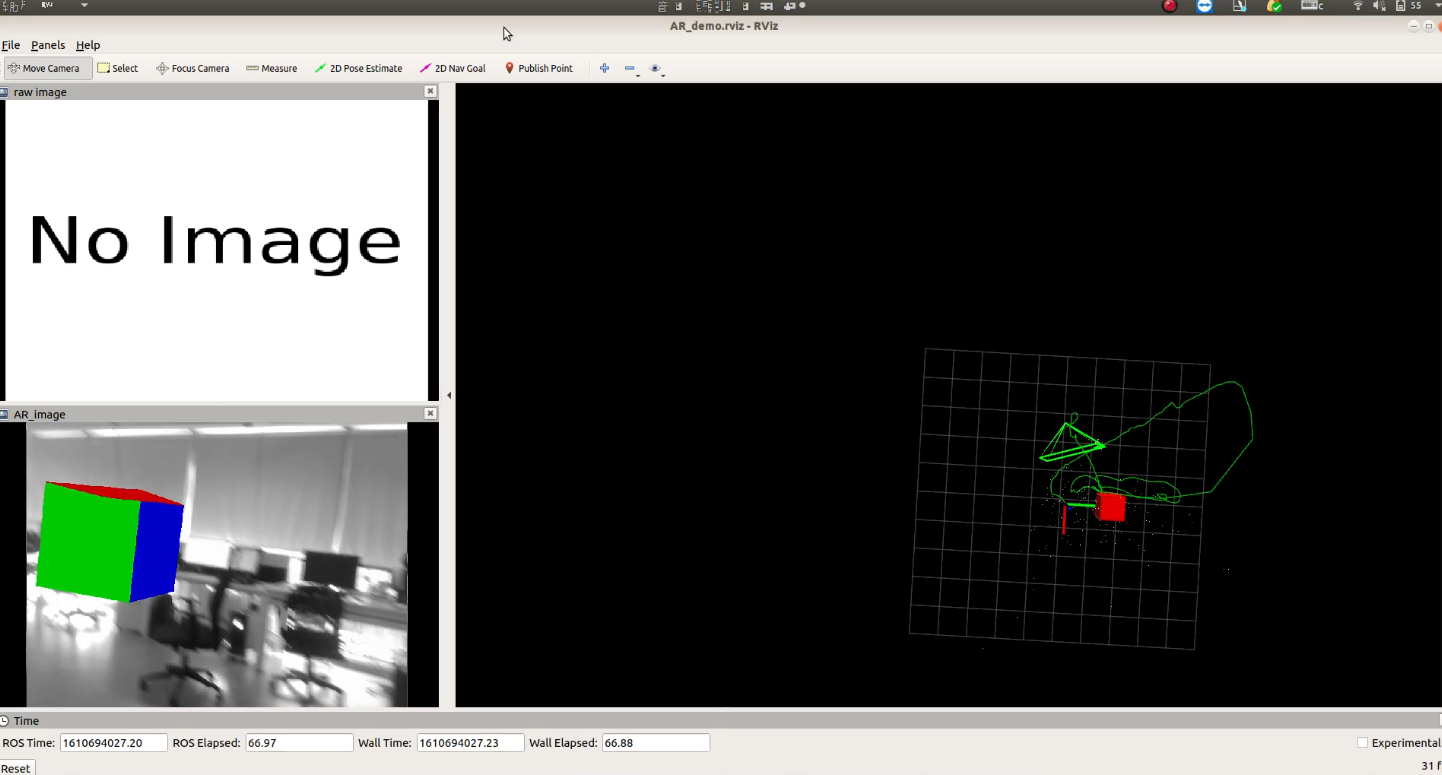
ARDEMO
由于不使用鱼眼镜头,故修改相关launch文件
在ar_demo中新建realsense_ar_435.launch
<launch>
<include file="$(find vins_estimator)/launch/realsense_color.launch"/>
<node pkg="ar_demo" type="ar_demo_node" name="ar_demo_node" output="screen">
<remap from="~image_raw" to="/camera/color/image_raw"/>
<remap from="~camera_pose" to="/vins_estimator/camera_pose"/>
<remap from="~pointcloud" to="/vins_estimator/point_cloud"/>
<param name="calib_file" type="string" value="$(find feature_tracker)/../config/realsense/realsense_color_config.yaml"/>
<param name="use_undistored_img" type="bool" value="false"/>
</node>
</launch>
roslaunch realsense2_camera rs_camera_vins.launch
roslaunch ar_demo realsense_ar_435.launch
roslaunch ar_demo ar_rviz.launch
References
https://blog.csdn.net/qq_42800654/article/details/109393646
https://blog.csdn.net/Coderii/article/details/87601836