SLAM是AR的重要技术基础,基于实验室的设备进行一些与AR结合的初步的探索,本篇探索2020年较新的明星级SLAM,ORB_SLAM3。
这里假装你已经配好了realsensesdk/ros/opencv/eigen,前两者的安装可以看上一篇文章。
安装依赖
Pangolin
git clone https://github.com/stevenlovegrove/Pangolin.git
sudo apt-get install libglew-dev
sudo apt-get install cmake
sudo apt-get install libpython2.7-dev
sudo apt-get install ffmpeg libavcodec-dev libavutil-dev libavformat-dev libswscale-dev libavdevice-dev
sudo apt-get install libdc1394-22-dev libraw1394-dev
sudo apt-get install libjpeg-dev libpng12-dev libtiff5-dev libopenexr-dev
cd Pangolin
mkdir build
cd build
cmake ..
cmake --build
sudo make install
OpenCV
编好了3.2.0,此处略
Eigen3
sudo apt-get install libeigen3-dev
编译ORB_SLAM3
进入ROS的src目录
git clone https://github.com/UZ-SLAMLab/ORB_SLAM3.git
这个版本是官方版本, 期间在下还尝试了3D视觉研习社的注释版本,最终使用了官方版本.
根据文献4, 把build.sh文件中的make -j 改成make -j4,防止编译卡死
根据文献5, 打开LoopClosing.h,将
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<const KeyFrame*, g2o::Sim3> > > KeyFrameAndPose;
改为
typedef map<KeyFrame*,g2o::Sim3,std::less<KeyFrame*>,
Eigen::aligned_allocator<std::pair<KeyFrame *const, g2o::Sim3> > > KeyFrameAndPose;
解决以下报错
/usr/include/c++/10/bits/stl_map.h:123:71: error: static assertion failed: std::map must have the same value_type as its allocator
进入ORB_SLAM3目录,运行以下指令:
chmod +x build.sh
./build.sh
编译ROS接口
首先要把ORB_SLAM3/Examples/ROS加入ros的包目录
sudo gedit ~/.bashrc
在最后加两句(换成你的相应目录):
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/k/ROS/catkin_ws/src/ORB_SLAM3_detailed_comments/Examples/ROS
source /home/k/ROS/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/build/devel/setup.bash
source 一下, 之后进入ORB_SLAM3目录,运行以下指令. 注意:不要瞎用sudo去运行,我加了sudo之后莫名其妙说rosbuild找不到……
#安装ros版
chmod +x build_ros.sh
./build_ros.sh
配置435i相机参数
将ROS/ORBSLAM3下面的Asus.yaml复制改名为435i.yaml
roslaunch realsense2_camera rs_rgbd.launch
rostopic echo /camera/color/camera_info
得到K = [fx 0 cx 0 fy cy 0 0 1 ], 将相应数值填入yaml # Camera calibration and distortion parameters (OpenCV) 对应项下面
根据文献6, D435i的baseline为50mm,bf的值为bf = baseline (in meters) * fx,因此修改yaml # Close/Far threshold. Baseline times.和# IR projector baseline times fx (aprox.)对应项
AR测试
进入ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/AR,打开ros_mono_ar.cc,由于使用realsense测试,修改图像获取节点为”/camera/color/image_raw”,重新build_ros.sh
运行
roscore
rosrun ORB_SLAM3 MonoAR /home/k/ROS/catkin_ws/src/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/k/ROS/catkin_ws/src/ORB_SLAM3/Examples/ROS/ORB_SLAM3/435i.yaml
roslaunch realsense2_camera rs_camera.launch
可能报段错误,可尝试的解决方法是:在build.sh同目录下的cmakelist中,去掉-march=native
,因为它会降低可执行文件的移植性。在指定了-march后,gcc不会生成兼容的指令集,导致了该二进制文件在其他架构上运行时,该架构的cpu并不能识别相应指令,造成illegal instruction & segmentation fault。
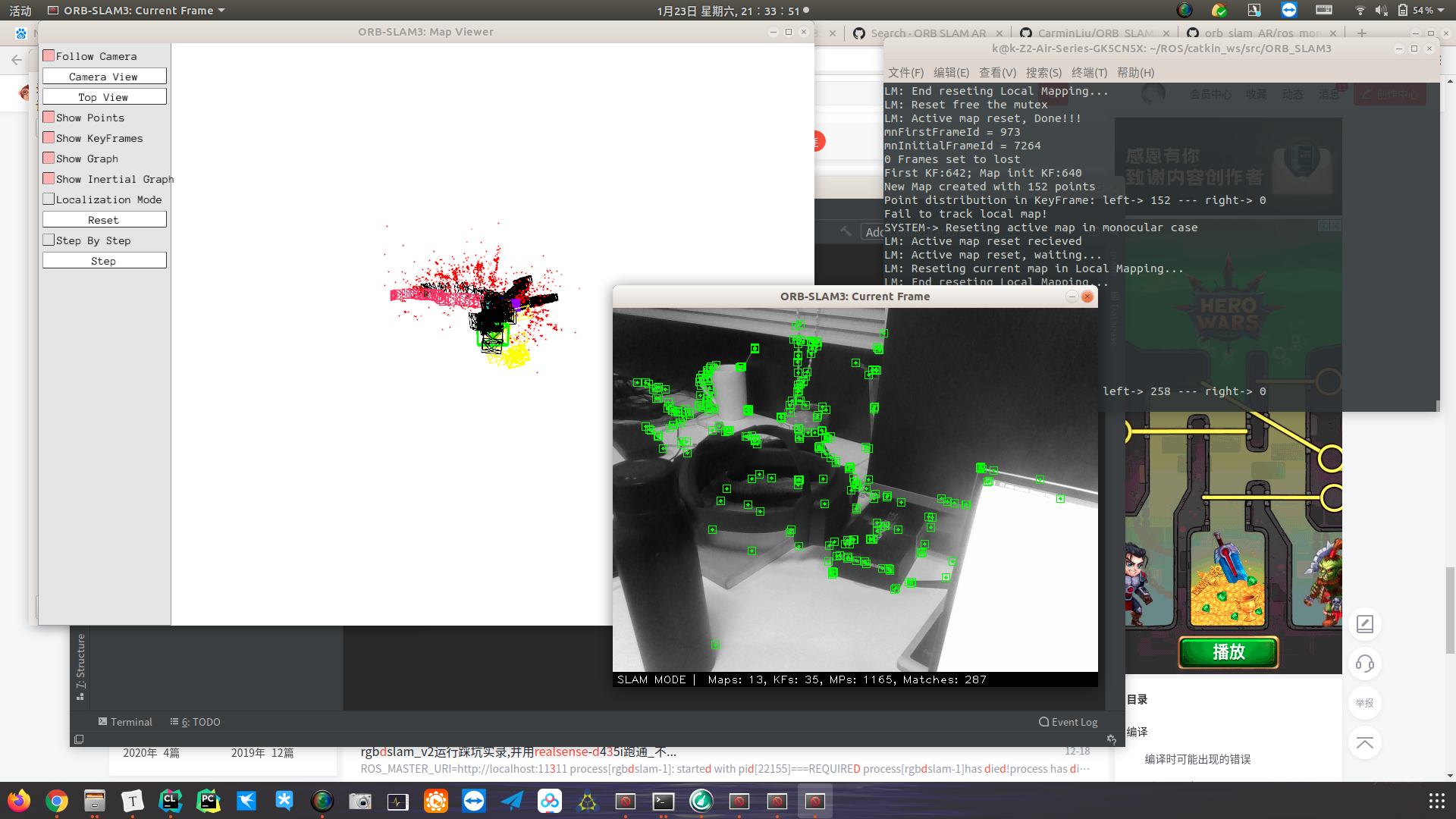
效果如图