接着上一讲。
可能用到的链接
【视频】中科院软件所-机器人操作系统入门https://www.bilibili.com/video/BV1mJ411R7Ni?p=2
【IDE】roboware的安装和基础
https://www.cnblogs.com/flyinggod/p/11444353.html
【cnblog】Ubuntu 18.04 + ROS Melodic + TurtleBot3仿真
https://www.cnblogs.com/raina/p/12162435.html
【知乎】ROS机器人实例-TurtleBot(1和3都有)
https://zhuanlan.zhihu.com/p/35822939
视频笔记:
ros中没有进程的概念,只有节点(node),ros就是提供了一套框架来管理这些node
ros工程框架中的最高级:catkin工作空间
建立工作空间并编译:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
catkin_make
source 【src路径】/devel/setup.bash(编译完成后刷新
src→build→devel(目标文件)
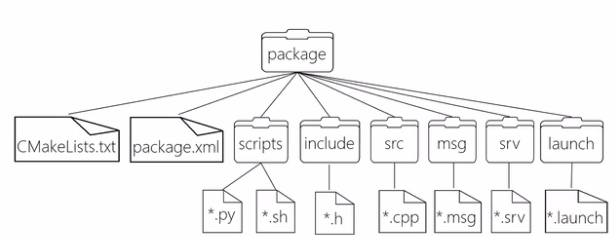
src下面有很多package,他是编译的基本单元
package里至少要有cmakelists.txt(编译规则)还有package.xml(自我描述)
可以放代码文件夹
scripts(.py,.sh)
include(.h)
src(.cpp)
可以放通信格式的文件夹
srv
msg
action
配置文件config(*.yaml)
launch
常用指令:
rospack find package_name查找包的地址
rospack list 列出所有本地包
roscd package_name 直接跳到pkg的路径
rosls package_name 相当于ls
rosed package_name file_name 编辑pkg中的文件 相当于vim
catkin_create_pkg
rosdep install … 安装包依赖
turtlebot3学习
最快的安装方法:
sudo apt-get install ros-melodic-turtlebot3-*
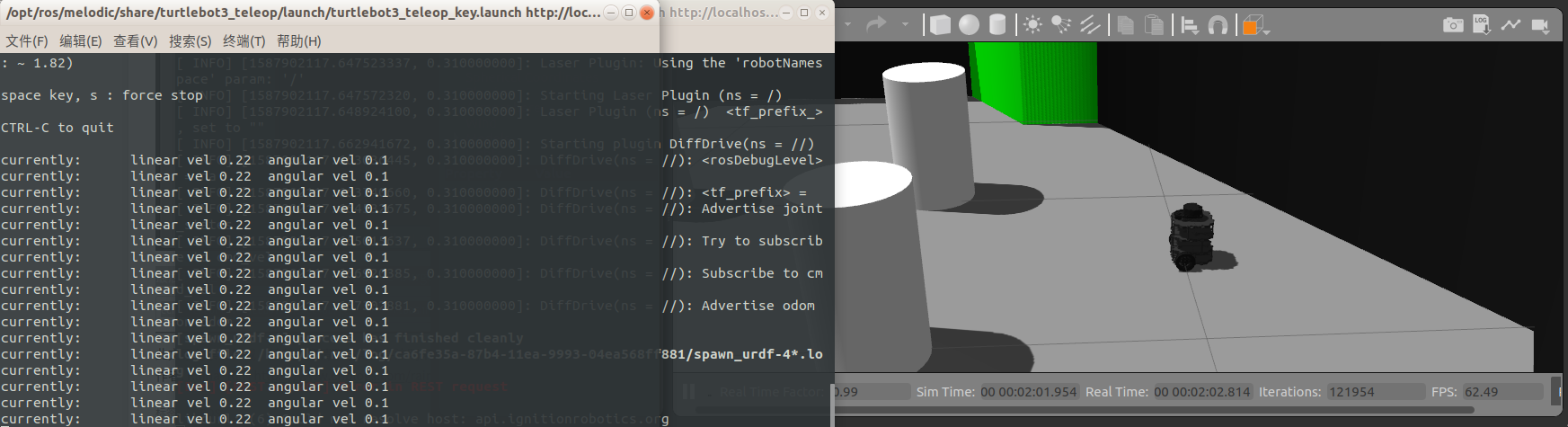
最快的测试方法(gazebo模拟+键盘控制运动):
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_world.launch
(新开一个终端)
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
最后我们把”export TURTLEBOT3_MODEL=burger”添加到.bashrc文件, 免得每次重新设置这个变量:
echo "export TURTLEBOT3_MODEL=burger" >> ~/.bashrc